Wugang MENG
在读博士研究生 | 电子与计算机工程系 | 自如机器人实验室

我目前在张福民教授的指导下于香港科技大学的电子与计算机科学系攻读博士学位,主要研究方向是机器人和智能感知。我对开发智能系统特别感兴趣;基于这些系统,机器人可以感知和推理他们的环境,从而做出自主决策。我于2023年在佐治亚理工学院获得计算机科学理学硕士学位。于2019年在哈尔滨工业大学毕业。
我的研究兴趣在于将感知信息转化为有效的机器人行动策略。此前,我主要研究智能感知和雷达SLAM。目前,我在尝试从视觉信号中开发新的场景表征,并创建能有效利用这些表征执行高级任务的机器人策略。
近况
| 2025, 05月 06日 | 我们在3D重建和搜索领域的新工作BEINGS已经被ICRA2025接收。 |
|---|---|
| 2024, 09月 16日 | 欢迎查看我们的新工作NuRF和BEINGS。 |
| 2024, 09月 16日 | blog.mwg.ink 作为旧版页面将不再提供。请访问我的新个人链接www.mwg.ink。 |
| 2023, 12月 28日 | 我们关于高斯过程空间的DOA估计方法已经发表了。 |
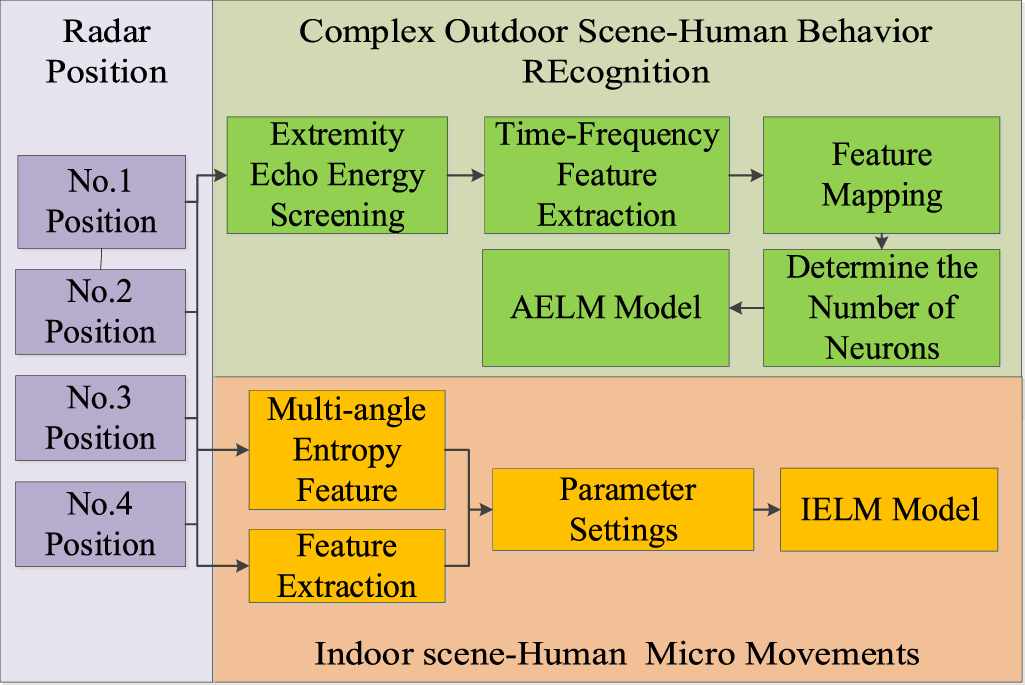
| 2023, 10月 10日 | 我们关于相控阵雷达DOA估计的ELM方法已经发表了。 |
精选文章
-
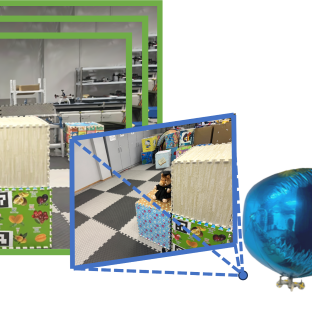
 BEINGS: Bayesian Embodied Image-Goal Navigation With Gaussian SplattingIn 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025
BEINGS: Bayesian Embodied Image-Goal Navigation With Gaussian SplattingIn 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025 -
 Nurf: Nudging the particle filter in radiance fields for robot visual localizationIEEE Transactions on Cognitive and Developmental Systems, 2025
Nurf: Nudging the particle filter in radiance fields for robot visual localizationIEEE Transactions on Cognitive and Developmental Systems, 2025 -
 A Hybrid Controller Design for Human-Assistive Piloting of an Underactuated BlimpIn 2024 36th Chinese Control and Decision Conference (CCDC), 2024
A Hybrid Controller Design for Human-Assistive Piloting of an Underactuated BlimpIn 2024 36th Chinese Control and Decision Conference (CCDC), 2024